
Capteur de mouvement - PIR
Description
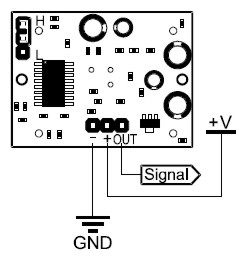
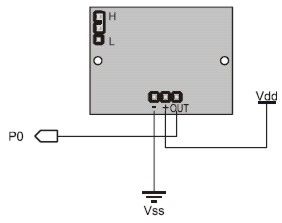
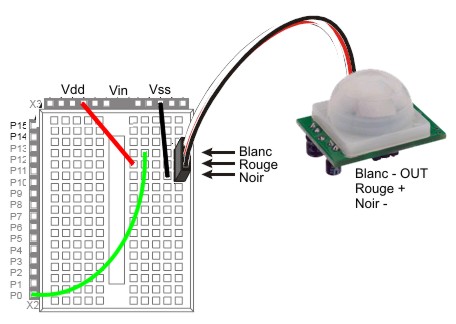
Le capteur de mouvement parallax permet la détection d'un mouvement jusqu'à 20 pieds. Tel qu'illustré sur l'image de droite, le capteur de mouvement PIR possède 3 connections. Les 2 premières entrées sont utilisées pour l'alimentation électrique du circuit (GND et +V). La sortie OUT indique si il y a un mouvement.
Dans nos exemples, la position du jumper doit être à H. |
 |
 |
Exemple
Ce programme affiche la valeur de sortie du capteur de mouvement PIR. Initialement, le capteur doit se calibrer pendant environ 20 secondes. Durant cette période, il faut avoir aucun mouvement en avant du capteur. Par la suite, la valeur de l'interface P0 est affichée à l'aide de la commande DEBUG
|
|
|
Déplacez divers objets de différentes tailles à plusieurs distances et vitesste différentes pour bien comprendre la sensibilité du capteur.
Exercice
Créez un système d'alarme qui produit un son lorsque quelqu'un se déplace devant le capteur.