
Servo-moteur
Description d'un servo-moteur Un servo-moteur est un moteur combiné avec un capteur qui permet de tourner l'axe de rotation à un angle donné. Certain servo-moteur dont l'axe de rotation est continu permet de tourner à des vitesses variables. Ce type de moteur est souvant utilisé en robotique ou dans les véhicules télécommandés (avion, hélicoptère, auto, ...)
Dans le cadre du cours nous utiliserons les servo-moteurs standart de Parallax et le GWS03N STD.
|
|


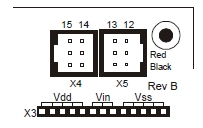


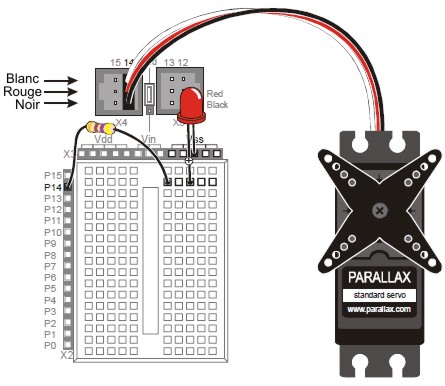
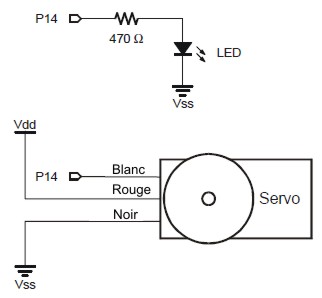
Branchement du servo moteur au microcontroleur Il est important de bien branché le servo-moteur car, si on inverse les fils blanc et noir du câble d'alimentation, on peut endommager les circuits du servo-moteur.
|
 |
Exemple 1
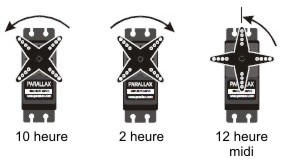
Dans cet exemple, nous allons modifier la position de l'axe du moteur. Dans un premier temps, la position du servo-moteur se dirigera rapidement vers 10h00, ensuite vers 2h00 pour terminer à midi.
|
La commande PULSOUT permet d'envoyer une impulsion électrique de très courte durée. La duré de l'impulsion est lue par le servo-moteur et l'axe de rotation est déplacé en concéquence.
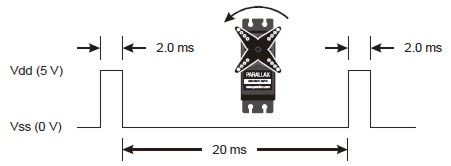
PULSOUT 14,1000 envoi une impulsion sur l'interface 14 d'une durée de 1000 x 2 microsecondes (2000 microsecondes ou 2 millisecondes). |
Une impulsion de 2,0 ms à chaque 20ms déplace le servo-moteur à 10 heure. D'où l'importance de la ligne de code PAUSE 20
| FOR counter = 1 TO 150 NEXT |
La boucle FOR permet de spécifier la durée que le servo-moteur doit conserver cette position. Sans la boucle FOR, le servo-moteur se déplacerait à 10 heure mais ne mentiendrait pas de force pour conserver la position. |
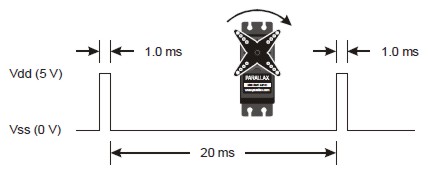
PULSOUT 14,500 envoi une impulsion sur l'interface 14 d'une durée de 500 x 2 micro seconde (1000 microseconde ou 1 milliseconde) Une impulsion de 1.0ms à chaque 20ms déplace le servo-moteur à 2 heure. |
 |
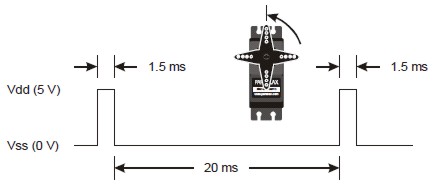
PULSOUT 14,750 envoi une impulsion sur l'interface 14 d'une durée de 750 x 2 micro seconde (1500 microseconde ou 1,5 milliseconde) Une impulsion de 1.5 ms à chaque 20ms déplace le servo-moteur à midi. |
 |
Exemple 2
Nous allons maintenant créer un programme qui permet d'entrer manuellement l'impulsion à envoyer au servo-moteur et le temps que la position doit être maintenu.
|
Expérimentez différentes valeurs pour le temps et l'impulsion. L'impulsion doit être un nombre entre 500 et 1000 et le temps un nombre entre 1 et 65534 puisqu'il s'agit d'une variable de type Word.
IMPORTANT : L'implusion doit être entre 500 et 1000 pour les servo-moteur de Parallax. Une valeur inférieur à 500 ou supérieur à 1000 forcerait le moteur à atteindre une position pour laquelle il n'a pas été conçu.
Question :
- Quelle doit être la valeur de temps pour maintenir la position du moteur servo pendant 1 seconde?
Pour empêcher l'utilisateur d'entrer une valeur incorrect pour la durée de la pulsation, on peut ajouter le code suivant :
|