
Servo-moteur : Transformer une position en un déplacement
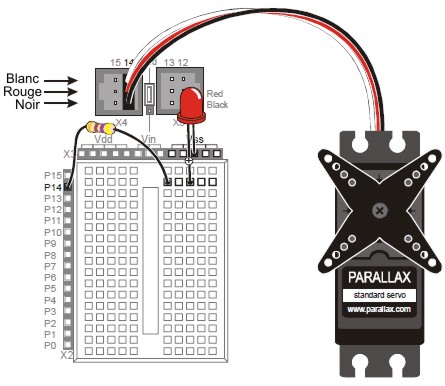
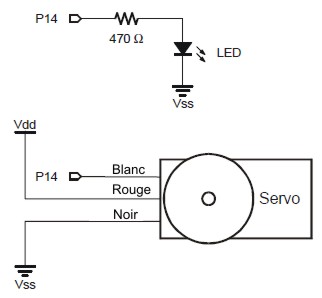
Rappel - Branchement du servo moteur au microcontroleur Il est important de bien branché le servo-moteur car par exemple, si on inverse les fils blanc et noir du câble d'alimentation, on peut endommager les circuits du servo-moteur.
|
 |
Exemple 3
Nous allons maintenant programmer le microcontrolleur afin de modifier sa position à différentes vitesse. Considérons le code suivant :
|
La première fois que la boucle s'exécute, compteur=500, donc la position du servo-moteur est à 2 heures. Au fur et à mesure que la boucle FOR s'exécute la valeur envoyé par la commande PULSOUT augmente jusqu'à 1000 de sorte que la position du servo-moteur se déplacera dans le sens anti-horaire pour terminer à 10 heures.
Considéron maintenant l'ajout de la commande STEP à notre boucle FOR.
|
Quelle impact la commande STEP 8 a sur le servo-moteur?
Ensuite modifiez la boucle FOR pour le code ci-dessous.
|
Expliquez comment on peut modifier la boucle FOR pour modifier la position du servo-moteur.
|
Remarquez le code à l'intérieur des boucles FOR :
![]() PULSOUT 14, counter
PULSOUT 14, counter
![]() PAUSE 7
PAUSE 7
![]() DEBUG DEC5 counter, CR, CRSRUP
DEBUG DEC5 counter, CR, CRSRUP
Pourquoi on a PAUSE 7 au lieu de PAUSE 20 comme dans les exemples précédents? Il faut comprendre que dans cet exemple, la commande DEBUG prend 13 millisecondes pour s'exécuter, ce qui donne un total de 20 millisecondes.
Exercice
- Modifiez le programme précédent avec différentes valeurs pour STEP
- Expérimentez différentes valeurs pour PAUSE entre 3 et 12 pour trouver le nombre qui permet une rotation la plus fluide.
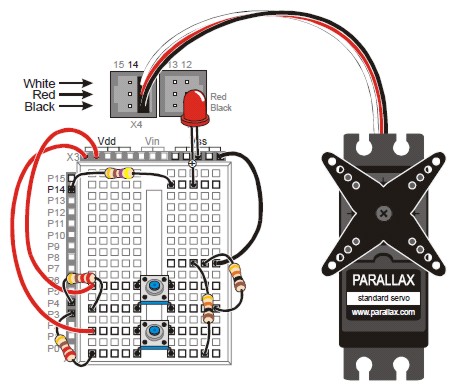
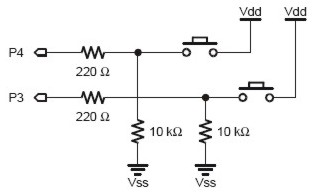
Exemple 4 : Modifier la direction du mouvement avec de bouton poussoir
Dans cet exemple, nous allons utiliser 2 boutons poussoir pour changer la direction de rotation du servo-moteur. Lorsqu'on utilise une boucle FOR, il faut connaître la valeur de départ et de fin du compteurde la boucle ce qui n'est pas le cas ici. La direction n'est pas pré-déterminée mais plutôt contrôlée par l'utilisateur. Nous allons donc utiliser une structure de sélection (IF) combinée à une boucle DO...LOOP.
|
 |
|
Exercice
- Ajuster le programme pour imposer sur le servo-moteur un déplacement de 650 à 850 au lieu de 500 à 1000
- Ajuster le code pour que la vitesse de rotation soit réduire de moitié.